Convolution is one of the fundamental concepts of image processing (and more generally, signal processing). For the scikit-image tutorial at Scipy 2014, I created an IPython widget to help visualize convolution. This post explains that widget in more detail.
Only a small portion of this post is actually about using the widget API. IPython notebook widgets have a really easy-to-use API, so only a small bit of code is necessary. That said, this is a really nice demo of both image convolution and the usefulness of IPython widgets.
Requirements
If you want run the notebook version of this post (Download Notebook), you'll need:
- IPython >= 2.0
- matplotlib >= 1.3 (earlier versions probably work)
- scikit-image >= 0.9
Aside about plotting...
Before we get started, let's define a bit of boilerplate that's useful for any IPython notebook dealing with images:
%matplotlib inline
import matplotlib.pyplot as plt
plt.rcParams['image.cmap'] = 'gray'
plt.rcParams['image.interpolation'] = 'none'
I highly recommend setting the default colormap to 'gray' for images and pretty much everything else. (There are, however, exceptions, as you'll see below.) Also, using nearest neighbor interpolation (which is what 'none' does for zoomed-in images) makes pixel boundaries clearer.
Image convolution
The basic idea of image convolution is that you take an image like this:
from skimage import data, filter
image = data.camera()
# Ignore the Gaussian filter, for now.
# (This is explained at the end of the article.)
smooth_image = filter.gaussian_filter(image, 5)
plt.imshow(smooth_image);

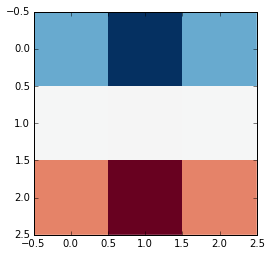
... and filter the image using a convolution "kernel" that looks like this:
import numpy as np
horizontal_edge_kernel = np.array([[ 1, 2, 1],
[ 0, 0, 0],
[-1, -2, -1]])
# Use non-gray colormap to display negative values as red and positive
# values as blue.
plt.imshow(horizontal_edge_kernel, cmap=plt.cm.RdBu);
... to arrive at a result that looks like this:
from scipy.ndimage import convolve
horizontal_edge_response = convolve(smooth_image, horizontal_edge_kernel)
plt.imshow(horizontal_edge_response, cmap=plt.cm.RdBu);
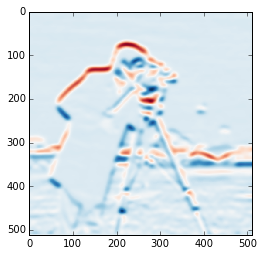
As the variable names suggest, this filter highlights the horizontal edges of an image. We'll see what's happening here later on.
(Note that the coloring in the kernel and the filtered image come from the colormap that's used. The output is still a grayscale image: The red just means that a value is negative, and the blue is positive.)
An IPython widget for demonstrating image convolution
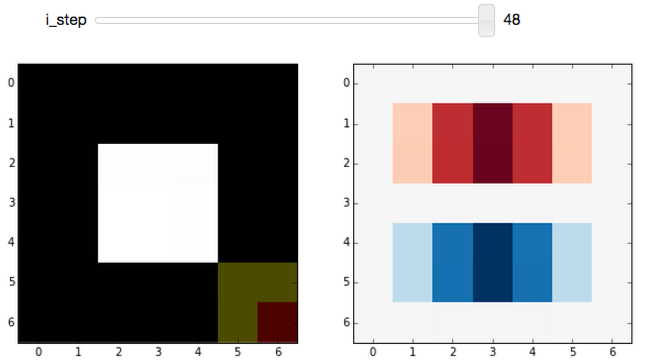
We're going to develop an IPython widget that looks something like this:
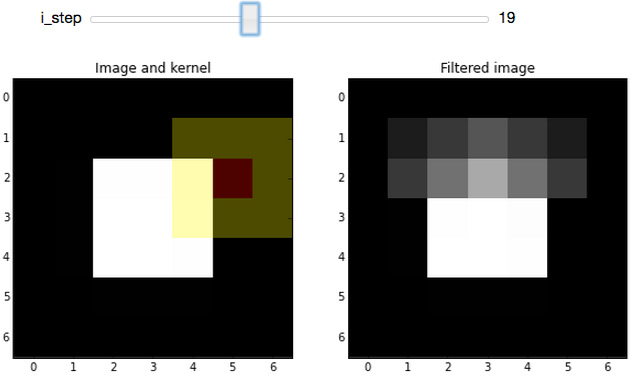
The slider in the widget allows you to step through the convolution process for each pixel in an image. The image (a white square with a black background) used for the demo is really boring to make the filtering process clearer.
The plot on the left shows the original, unfiltered, image. On top of that, we overlay the kernel position: The center pixel of the kernel is tinted red, and the remaining pixels in the kernel are tinted yellow. The red pixel is the one being replaced by the current step of the convolution procedure, while red and yellow pixels are used to determine the replacement value.
On the right, we see the image at the ith step of the convolution process, which gives the (partially) filtered result.
Before we get started though, let's define some helper functions.
Some helper functions
Helper functions are great: They make code much more readable and reusable, which is what we should all be striving for. It's not necessary to understand these functions right away. You can easily skip over this for now, and revisit it if you have questions about the actual widget implementation. The function names, themselves, should be enough to describe their... ahem... functionality (except for iter_kernel_labels, that one's tough to describe succinctly).
Iterate over pixels with iter_pixels
First of all, we're going to want to look at the individual pixels of an image. So, let's define an iterator (or actually a generator) to make that easy:
def iter_pixels(image):
""" Yield pixel position (row, column) and pixel intensity. """
height, width = image.shape[:2]
for i in range(height):
for j in range(width):
yield (i, j), image[i, j]
This "yields" the row, column, and pixel value for each iteration of a loop. By the way: You wouldn't normally loop over pixels (since Python loops are a bit slow) but the whole point of this widget is to go step-by-step.
Showing images side-by-side with imshow_pair
Like I said, I like small utility functions, so I pulled out the code to plot side-by-side images into its own function:
def imshow_pair(image_pair, titles=('', ''), figsize=(10, 5), **kwargs):
fig, axes = plt.subplots(ncols=2, figsize=figsize)
for ax, img, label in zip(axes.ravel(), image_pair, titles):
ax.imshow(img, **kwargs)
ax.set_title(label)
Dealing with boundary conditions
What's the hardest part of any math problem (discrete, or otherwise)?
Boundary conditions! (That's what they tell engineers, at least. If you're doing "real" math that's probably not true. Actually, even if that's not the case, it's probably not true.)
There are many different solutions to dealing with boundaries; what we're going to do is just pad the input image with zeros based on the size of the kernel.
Calculating border padding with padding_for_kernel
First we define, a utility function to figure out how much padding to add based on the kernel shape. Basically, this just calculates the number of pixels that extend beyond the center pixel:
def padding_for_kernel(kernel):
""" Return the amount of padding needed for each side of an image.
For example, if the returned result is [1, 2], then this means an
image should be padded with 1 extra row on top and bottom, and 2
extra columns on the left and right.
"""
# Slice to ignore RGB channels if they exist.
image_shape = kernel.shape[:2]
# We only handle kernels with odd dimensions so make sure that's true.
# (The "center" pixel of an even number of pixels is arbitrary.)
assert all((size % 2) == 1 for size in image_shape)
return [(size - 1) // 2 for size in image_shape]
Padding an image border with add_padding
Then we define another utility function that uses the above function to pad the border of an image with zeros:
def add_padding(image, kernel):
h_pad, w_pad = padding_for_kernel(kernel)
return np.pad(image, ((h_pad, h_pad), (w_pad, w_pad)),
mode='constant', constant_values=0)
Reverse add_padding with remove_padding
And sometimes, we need to take the padded image (or more likely, a filtered version of the padded image), and trim away the padded region, so we define a function to remove padding based on the kernel shape:
def remove_padding(image, kernel):
inner_region = [] # A 2D slice for grabbing the inner image region
for pad in padding_for_kernel(kernel):
slice_i = slice(None) if pad == 0 else slice(pad, -pad)
inner_region.append(slice_i)
return image[inner_region]
Padding demo
Just to make those functions a bit clearer, let's run through a demo. If you have an image that has a shape like:
image = np.empty((10, 20))
print(image.shape)
(10, 20)
... and a kernel that has a shape like:
kernel = np.ones((3, 5))
print(kernel.shape)
(3, 5)
... adding padding to the image gives:
padded = add_padding(image, kernel)
print(padded.shape)
(12, 24)
Note that the total amount of padding is actually one less than the kernel size since you only need to add padding for neighbors of the center pixel, but not the center pixel, itself. (If this isn't clear, hopefully it will become clear when we start visualizing.)
And of course, using remove_padding gives us the original shape:
print(remove_padding(padded, kernel).shape)
(10, 20)
Slicing into the image with window_slice
We're going to iterate over the pixels of an image and apply the convolution kernel in the 2D neighborhood (i.e. "window") of each pixel. To that end, it really helps to have an easy way to slice into an image based on the center of the kernel and the kernel shape, so here's a pretty simple way of doing that:
def window_slice(center, kernel):
r, c = center
r_pad, c_pad = padding_for_kernel(kernel)
# Slicing is (inclusive, exclusive) so add 1 to the stop value
return [slice(r-r_pad, r+r_pad+1), slice(c-c_pad, c+c_pad+1)]
The center parameter is just the (row, column) index corresponding to the center of the image patch where we'll be applying the convolution kernel.
As a quick example, take a 2D array that looks like:
image = np.arange(4) + 10 * np.arange(4).reshape(4, 1)
print(image)
[[ 0 1 2 3] [10 11 12 13] [20 21 22 23] [30 31 32 33]]
The values in this array are carefully chosen: The first and second digit match the row and column index.
We can use window_slice to slice-out a 3x3 window of our array as follows:
dummy_kernel = np.empty((3, 3)) # We only care about the shape
center = (1, 1)
print(image[window_slice(center, dummy_kernel)])
[[ 0 1 2] [10 11 12] [20 21 22]]
Note that the center pixel is 11, which corresponds to row 1, column 1 of the original array. We can increment the column to shift to the right:
print(image[window_slice((1, 2), dummy_kernel)])
[[ 1 2 3] [11 12 13] [21 22 23]]
Or increment the row to shift down:
print(image[window_slice((2, 1), dummy_kernel)])
[[10 11 12] [20 21 22] [30 31 32]]
Non-square kernels would work too:
dummy_kernel = np.empty((3, 1))
print(image[window_slice((2, 1), dummy_kernel)])
[[11] [21] [31]]
Applying the kernel to an image patch with apply_kernel
To actually "apply" the convolution kernel to an image patch, we just grab an image patch based on the center location and the kernel shape, and then "apply" the kernel by taking the sum of pixel intensities under the kernel, weighted by the kernel values:
def apply_kernel(center, kernel, original_image):
image_patch = original_image[window_slice(center, kernel)]
# An element-wise multiplication followed by the sum
return np.sum(kernel * image_patch)
Technically, convolution requires flipping the kernel horizontally and vertically, but that's not really an important detail here.
Labeling the kernel position with iter_kernel_labels
The whole point of this widget is to visualize how convolution works, so we need a way to display where the convolution kernel is located at any given iteration. To that end, we do a bit of array manipulation to mark:
- Pixels under the kernel with a value of 1
- The pixel at the center of the kernel with a value of 2
- All other pixels with a value of 0
def iter_kernel_labels(image, kernel):
""" Yield position and kernel labels for each pixel in the image.
The kernel label-image has a 2 at the center and 1 for every other
pixel "under" the kernel. Pixels not under the kernel are labeled as 0.
Note that the mask is the same size as the input image.
"""
original_image = image
image = add_padding(original_image, kernel)
i_pad, j_pad = padding_for_kernel(kernel)
for (i, j), pixel in iter_pixels(original_image):
# Shift the center of the kernel to ignore padded border.
i += i_pad
j += j_pad
mask = np.zeros(image.shape, dtype=int) # Background = 0
mask[window_slice((i, j), kernel)] = 1 # Kernel = 1
mask[i, j] = 2 # Kernel-center = 2
yield (i, j), mask
Visualizing our kernel overlay with visualize_kernel
Now we want to take those 1s and 2s marking our kernel, and turn that into a color overlay. We do that using a little utility from scikit-image that overlays label values onto an image:
from skimage import color
def visualize_kernel(kernel_labels, image):
""" Return a composite image, where 1's are yellow and 2's are red.
See `iter_kernel_labels` for info on the meaning of 1 and 2.
"""
return color.label2rgb(kernel_labels, image, bg_label=0,
colors=('yellow', 'red'))
Here we color the center value (i.e. 2) red and neighboring values (i.e. 1) yellow. The background value (i.e. 0) is transparent.
IPython widget demo
So all of the above helper functions were just to get us to this point: Making our own IPython widget.
But before that (such a tease), here's a really basic example of IPython widgets, in case the concept is completely new to you.
A very simple widget
To define your own IPython widget, all you need to do is pass a function and the argument(s) you want to control to widgets.interact. So a very simple example would just be:
from IPython.html import widgets
def printer(i):
print("i = {}".format(i))
# This should be executed in an IPython notebook!
widgets.interact(printer, i=(0, 10));
If you run this code in an IPython notebook, you should see a slider and i = 5 printed by default. Moving the slider changes the value printed by printer. The keyword argument, i, must match the argument name in printer; that's how slider value gets connected to the printer function.
A stepper function for image convolution
For the real widget, we're going to combine all of the helper functions defined above. Unfortunately, there are a couple of things here that make the code a bit more complicated than I would like:
- First, I wanted to make something that's fairly reusable. To that end, the following code snippet creates a function that returns the function passed to widgets.interact. That way we can prep the image and cache results (see below).
- This function-that-returns-a-function is called a closure. Here's a pretty good explanation of the concept: Closure explanation
- I'm going to do a bit of work here to cache results so that the demo function only computes the filtered result for each pixel once. Basically, we iterate over pixels in order, so we can cache a result for a pixel, and then we reuse the result to compute the result for the next pixel.
def make_convolution_step_function(image, kernel, **kwargs):
# Initialize generator since we're only ever going to iterate over
# a pixel once. The cached result is used, if we step back.
gen_kernel_labels = iter_kernel_labels(image, kernel)
image_cache = []
image = add_padding(image, kernel)
def convolution_step(i_step):
""" Plot original image and kernel-overlay next to filtered image.
For a given step, check if it's in the image cache. If not
calculate all necessary images, then plot the requested step.
"""
# Create all images up to the current step, unless they're already
# cached:
while i_step >= len(image_cache):
# For the first step (`i_step == 0`), the original image is the
# filtered image; after that we look in the cache, which stores
# (`kernel_overlay`, `filtered`).
filtered_prev = image if i_step == 0 else image_cache[-1][1]
# We don't want to overwrite the previously filtered image:
filtered = filtered_prev.copy()
# Get the labels used to visualize the kernel
center, kernel_labels = gen_kernel_labels.next()
# Modify the pixel value at the kernel center
filtered[center] = apply_kernel(center, kernel, image)
# Take the original image and overlay our kernel visualization
kernel_overlay = visualize_kernel(kernel_labels, image)
# Save images for reuse.
image_cache.append((kernel_overlay, filtered))
# Remove padding we added to deal with boundary conditions
# (Loop since each step has 2 images)
image_pair = [remove_padding(each, kernel)
for each in image_cache[i_step]]
imshow_pair(image_pair, **kwargs)
plt.show()
return convolution_step # <-- this is a function
Now we just initialize the stepper function and pass that to widgets.interact:
from IPython.html.widgets import IntSliderWidget
def interactive_convolution_demo(image, kernel, **kwargs):
stepper = make_convolution_step_function(image, kernel, **kwargs)
step_slider = IntSliderWidget(min=0, max=image.size-1, value=0)
widgets.interact(stepper, i_step=step_slider)
There's a bit of tweaking here just to get the slider widget to start off at zero, but that's not crucial. You could have used
widgets.interact(stepper, i_step=(0, image.size-1))
but that would start with the slider at the midpoint, which isn't ideal for this particular demo.
Demo: Mean filtering
Up until this point, the code written here would work perfectly well in a normal python script. To actually use the widget, however, we need to execute the following lines in an IPython notebook (Download Notebook).
Before using this widget, let's define a really small image, which makes this demo easier to understand:
import numpy as np
bright_square = np.zeros((7, 7), dtype=float)
bright_square[2:5, 2:5] = 1
plt.imshow(bright_square);
One of the classic smoothing filters is the mean filter. As you might expect, it calculates the mean under the kernel. The kernel itself is just the weights used for the mean. For 3x3 kernel, this looks like:
mean_kernel = np.ones((3, 3), dtype=float)
mean_kernel /= mean_kernel.size
print(mean_kernel)
[[ 0.11111111 0.11111111 0.11111111] [ 0.11111111 0.11111111 0.11111111] [ 0.11111111 0.11111111 0.11111111]]
These weights will then be multiplied by pixel intensities using apply_kernel.
Using our convolution widget, we can see how the mean-filtering process looks, step-by-step:
# This should be executed in an IPython notebook!
titles = ('Image and kernel', 'Filtered image')
interactive_convolution_demo(bright_square, mean_kernel,
vmax=1, titles=titles)
which would create the following widget in an IPython notebook:
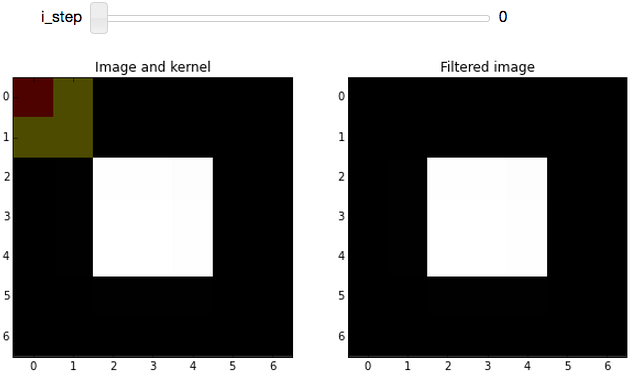
This sets up the widget at the first step of the convolution process. (As with most arrays/matrices, we'll start counting at the top-left corner). The filtered image (on the right) is unchanged because the kernel is centered on a very boring region (all zeros; including the out-of-bounds values, which are padded with zeros).
Boundary conditions, revisited: If you look at i_step = 0, you can see why we went through the trouble of defining all that image-padding code: If we want to apply the convolution kernel to the top-left pixel, it has no neighbors above it or to the left. Adding padding (which was removed for display) allows us to handle those cases without too much trouble.
As you increment i_step, you should see how the filtered image changes as non-zero pixels fall under the kernel:
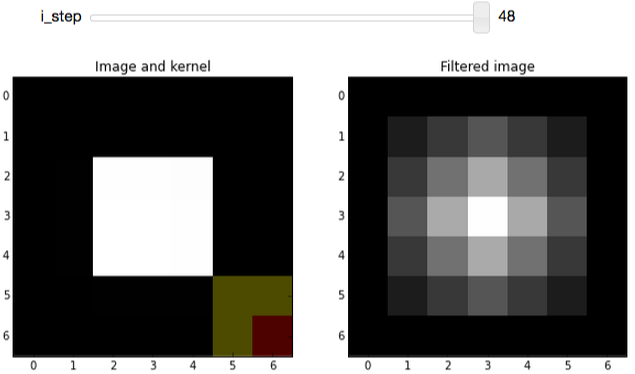
After playing around with the widget, you should notice that the mean kernel is really simple:
- Weight each pixel under the kernel (red+yellow) equally
- Add all products (pixel-values × 1/9) together
- Replace center pixel (red) with the sum
In the filtered result, hard edges are smoothed: Since a pixel on an edge will be bordering both white and black pixels, the filtered result will be gray. This smoothing effect can be useful for blurring an image or removing noise (although edge-preserving denoising filters are probably preferable).
Demo: Edge filtering
Finally, let's look at another really useful and easy-to-understand filter: The edge filter. For images, edges are basically boundaries between light and dark values. An easy way to calculate that is to take the difference of neighboring values.
Here, we'll use the Sobel kernel for detecting horizontal edges (which was defined at the very beginning):
print(horizontal_edge_kernel)
[[ 1 2 1] [ 0 0 0] [-1 -2 -1]]
Basically, using this kernel to calculate a weighted sum will subtract neighboring values below the center pixel from those above the center. If pixels above and below the center are the same, the filtered result is 0, but if they are very different, we get a strong "edge" response.
Again, using our convolution widget, we can step through the process quite easily:
# This should be executed in an IPython notebook!
interactive_convolution_demo(bright_square, horizontal_edge_kernel,
vmin=-4, vmax=4, cmap=plt.cm.RdBu)
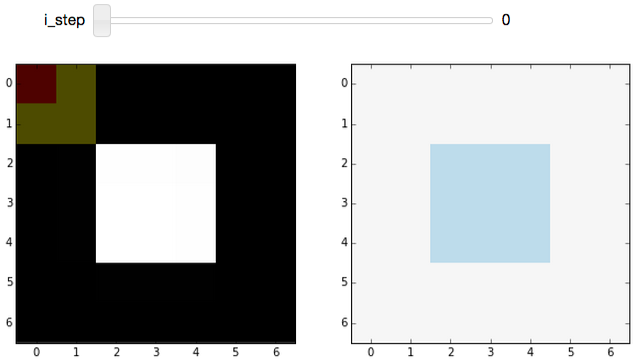
Again, we start off at a very boring region of the image, where all pixels under the kernel are zero. Incrementing the step shows the edge-filter at work:
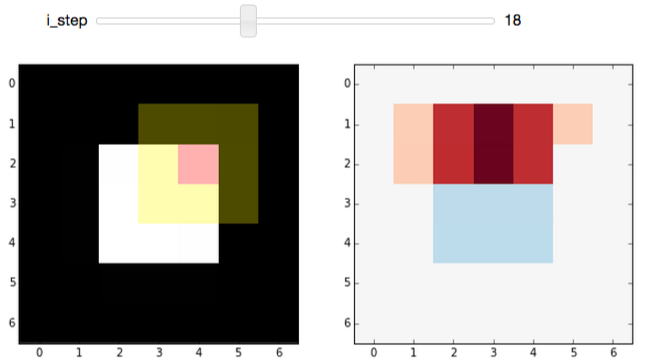
Play around with the widget a bit. You should notice that:
- This filter responds to horizontal edges (i.e. it is sensitive to the orientation of the edge).
- The filter responds differently when going from white-to-black vs black-to-white (i.e. it is sensitive to the direction of the edge).
- The edge response diminishes as it approaches a vertical boundary. This is because the kernel has a finite width (i.e. it's 3x3 instead of 3x1).
Often, you don't really care about the orientation or direction of the edge. In that case, you would just combine the horizontal-edge filter with the corresponding vertical-edge filter and calculate the gradient magnitude. This is exactly what the standard Sobel filter does.
I hope that clarifies the idea of convolution filters.
Leftovers
Why did the first example use a gaussian_filter?
Edge filters (which are basically just derivatives) enhance noise. We do some smoothing beforehand to reduce the likelihood of false edges.
Why are the "edges" (the red and blue regions) in that last filtered image so thick?
The edge filter used here gives what's called a "centered difference". In reality, the edges lie in-between pixel values, so the closest we can get (without biasing the edge up or down) is to mark the pixels above and below the edge.
What do you mean by "neighbors" and "under" the kernel?
In the kernel overlay, red marks the center pixel, yellow marks the neighbors, and both red and yellow pixels are "under" the kernel.
Does the step-order matter?
No. The widget steps from the top-left pixel down to the bottom-right pixel, but this order is arbitrary. The filtered value at each step is calculated from the original values so previous steps don't matter.
References
- Notebook version of this article (so you can actually use the widgets.)
- scikit-image tutorial at Scipy 2014
- Really useful linear filters:
- Gaussian filter, the classic smoothing filter
- Sobel filter for detection edges (a little different from the above since it takes the gradient magnitude, which means it doesn't care about direction or orientation)
- Useful generic filters:
- Generic (local) filters work in a similar fashion to the convolution filters described above, but they aren't limited to a linear, weighted sum.
- Denoising filters for removing noise without smoothing edges.
- Rank filters
- Morphological filters for manipulating shapes.
Comments
comments powered by Disqus